SO-ARM 101
March 2026 - Present
Currently assembling the follower arm and developing imitation learning using ROS2, PyTorch, and OpenCV.
Ongoing Projects
March 2026 - Present
Currently assembling the follower arm and developing imitation learning using ROS2, PyTorch, and OpenCV.
Past projects
September - October 2025
Developed a 2-DOF representation of a vehicle's suspension system that tracks the kinematics of the sprung (body) and the unsprung (wheels and axels). The equations of the sprung and the unsprung masses were heavily useful for the ME018A final exam. Planning to expand this project by creating a 4-DOF model, where the rear and the front wheels are considered.
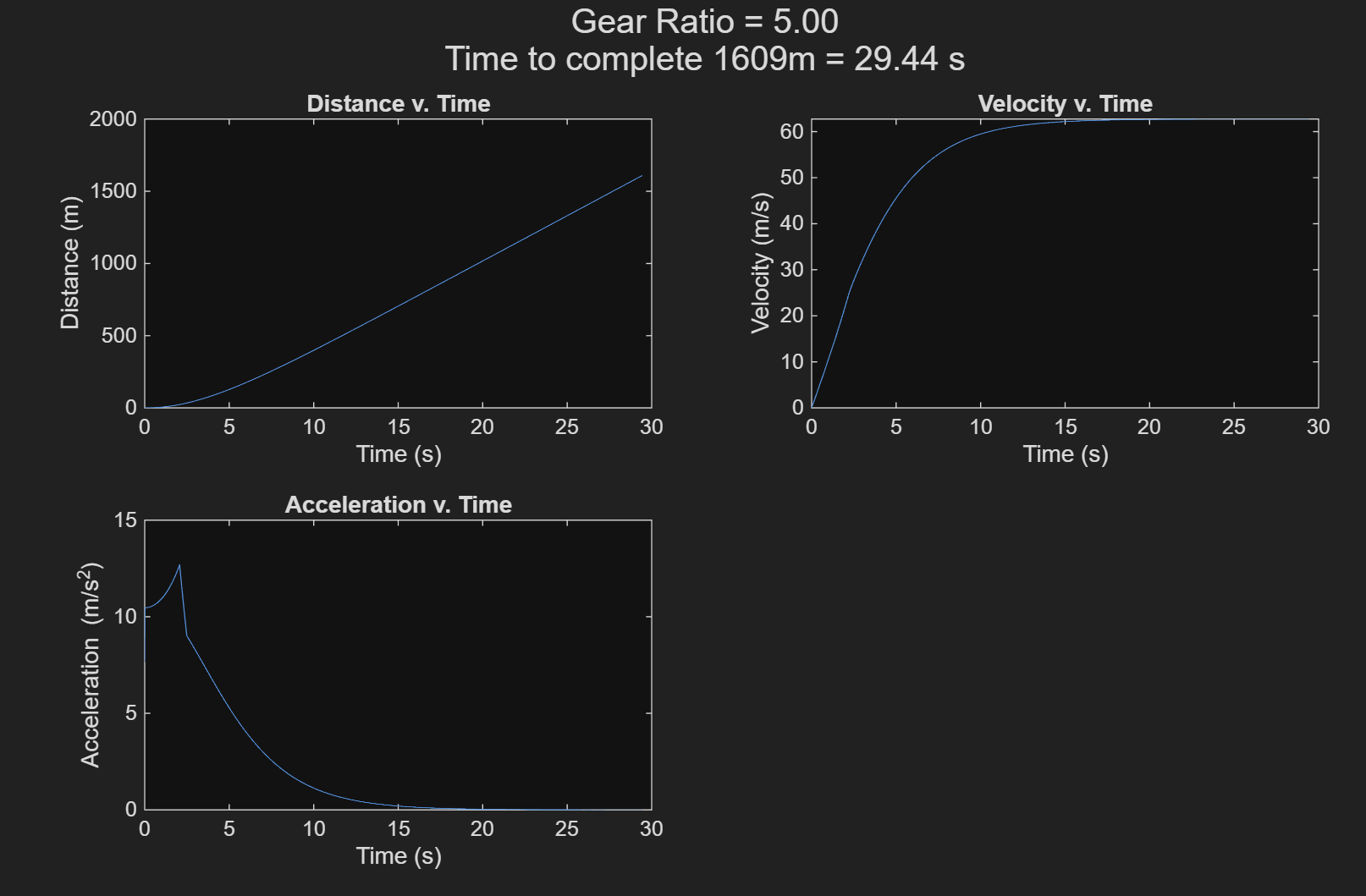
November - December 2025
Analyzed the kinematics of an accelerating FSAE racecar with real vehicle parameters. Considered additional factors such as load transfer, traction, and aerodynamic drag.