.jpg)
Global Navigation Satellite System (GNSS)
September 2025 - Present
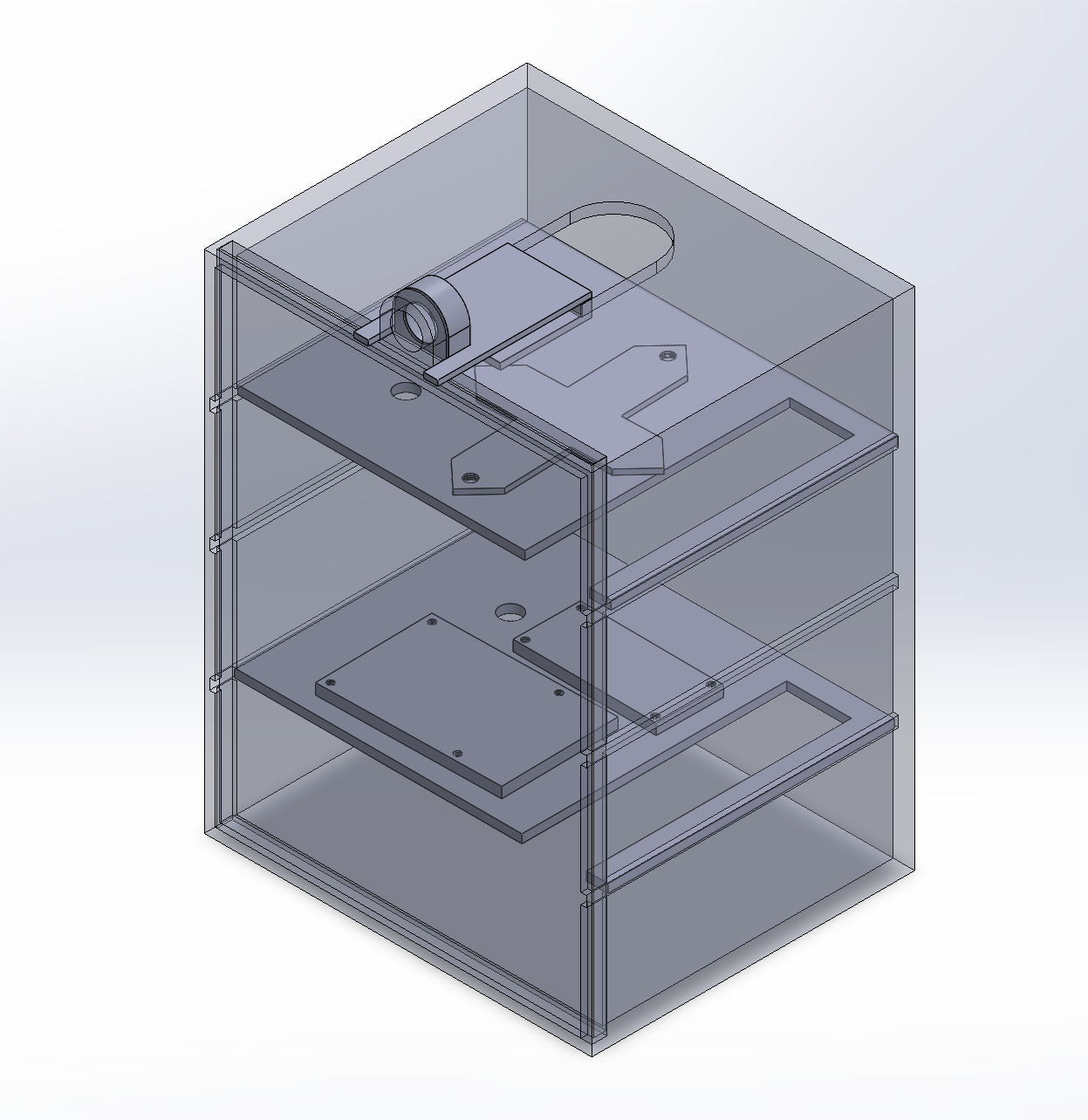
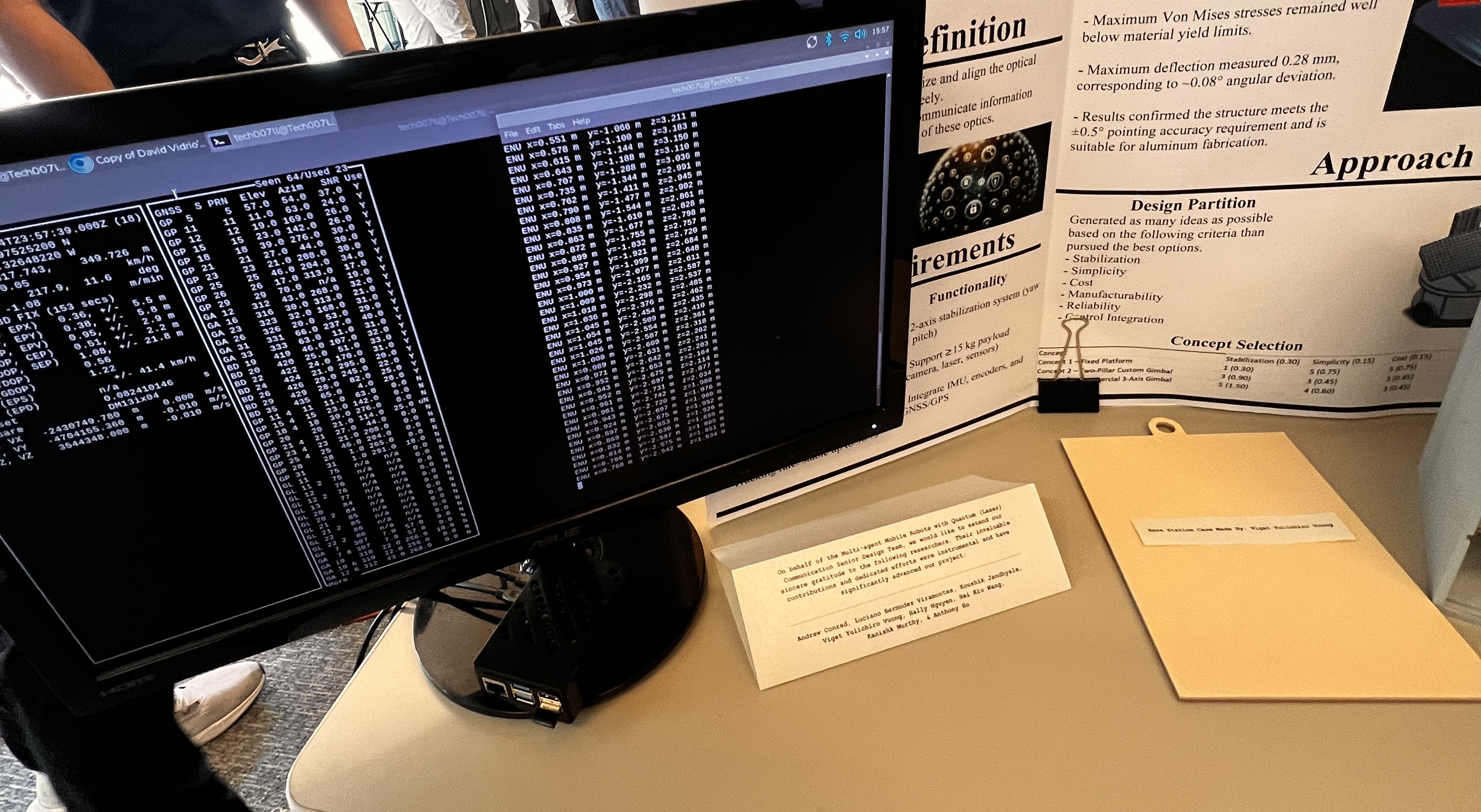
2-quarter senior design project on Multi-Agent Mobile Robots with Quantum (Laser) Communication. Led the design and development of the Global Navigation Satellite System (GNSS) enclosure to integrate precise positioning system for the mobile robots, in collaboration with a senior design teammate responsible for all GNSS implementation. Currently working on tracking robot kinematics (position, velocity, etc.) from 60+ satellites, then utilizing the GNSS data to calculate relative positions. System built using Raspberry Pi 5, u-blox ZED-F9T GNSS receiver module, antenna, etc.